图片来源于网络,如有侵权,请联系删除
证券之星消息,根据天眼查APP数据显示圣邦股份(300661)新获得一项发明专利授权,专利名为“一种充放电电流双向检测电路”,专利申请号为CN202011553777.2,授权日为2025年5月30日。
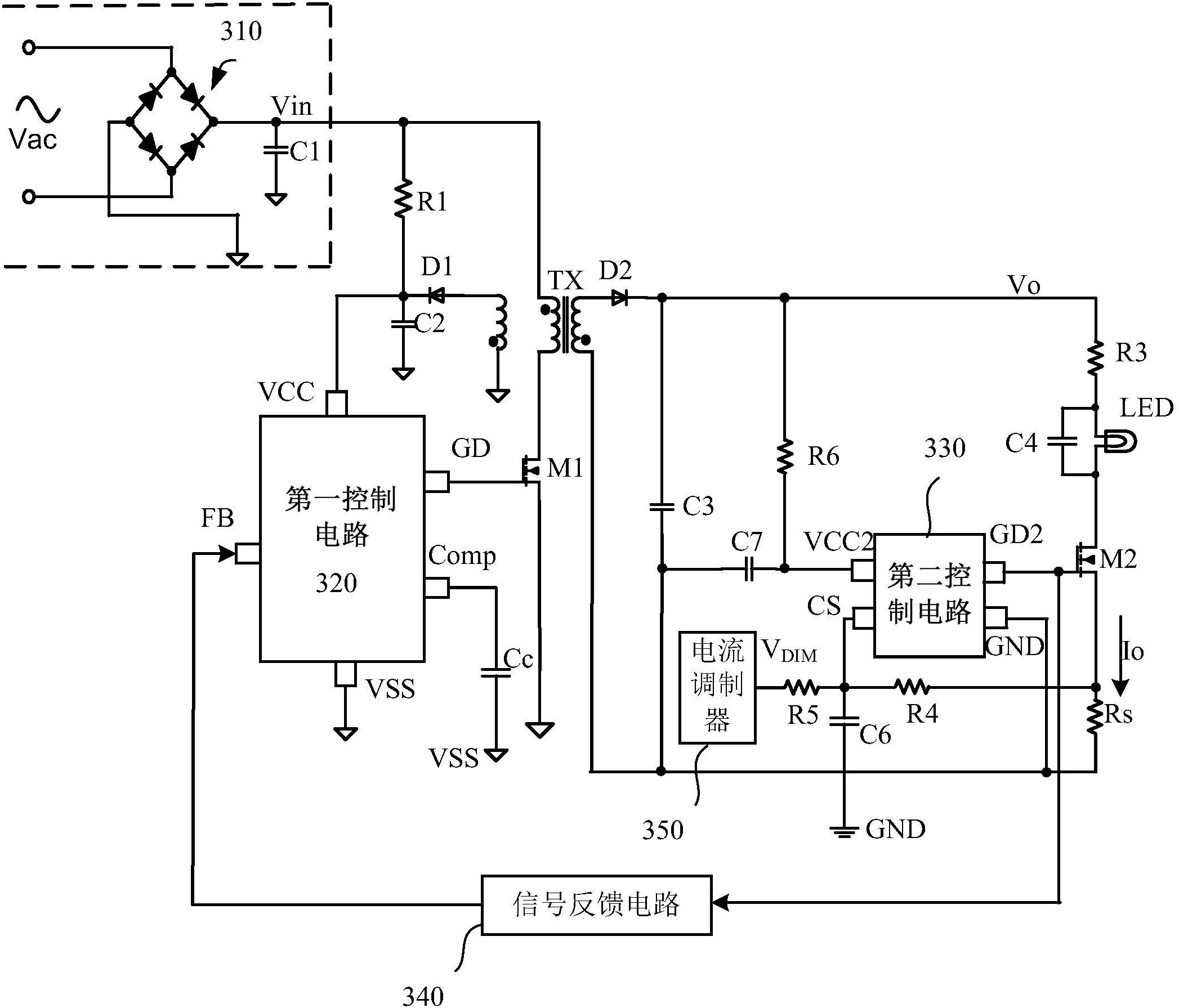
专利摘要:一种充放电电流双向检测电路,包括检测隔离电路、钳位运放电路,其特征在于:所述检测隔离电路,用于接收电池电流的正负输入,电池电压对高电平侧和低电平侧进行隔离;所述钳位运放电路,用于接收来自所述检测隔离电路生成的隔离电压,并输出采样电压;所述充放电电流双向检测电路还包括失调消除电路和双向检测电路,其中,所述失调消除电路,用于调节输入至检测隔离电路中第一或第二NMOS管的源漏极电流,以消除所述检测隔离电路的失调影响;所述双向检测电路,用于基于充放电状态控制所述电路对充放电电流进行检测。基于本发明中的检测电路,能够实现双向充放电检测,同时消除隔离误差。
今年以来圣邦股份新获得专利授权29个,较去年同期减少了34.09%。结合公司2024年年报财务数据,2024年公司在研发方面投入了8.71亿元,同比增18.14%。
数据来源:天眼查APP
以上内容为证券之星据公开信息整理,由AI算法生成(网信算备310104345710301240019号),不构成投资建议。